VESPA: Il Drone eVTOL per la UAS Challenge 2026
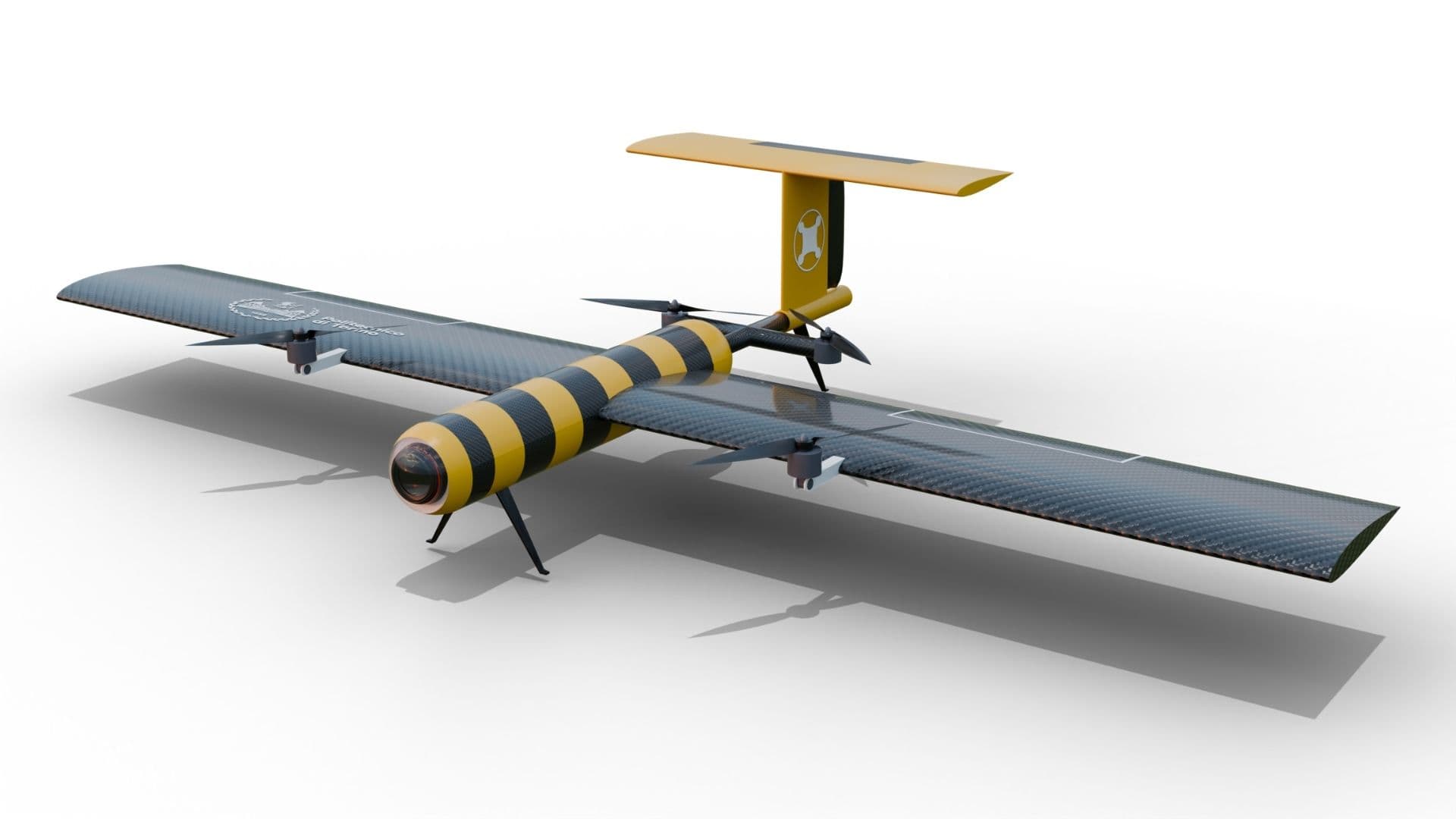
Sviluppato dal Team ZEFIRO – 19 del Politecnico di Torino, il VESPA è un velivolo unmanned elettrico a decollo e atterraggio verticale (eVTOL) progettato per la UAS Challenge 2026. Grazie alla configurazione a rotori basculanti e alla capacità di volo in crociera ad ala fissa, VESPA unisce la flessibilità di un multirotore all'efficienza aerodinamica di un aereo convenzionale.
"Un drone che decolla come un elicottero e vola come un aereo — progettato e costruito interamente dagli studenti."
Specifiche principali
Massa massima al decollo: 12,5 KgApertura alare: 2,80 m — Profilo alare: NACA 2412Lunghezza totale: 1,40 m — Lunghezza fusoliera: 0,90 mPropulsione: 4× motori brushless T-Motor VL5009 con ESC V60AEnergia: 2× batterie LiPo Gens Ace 6S 6000 mAh in serie (12S, 44,4V)Payload: 1 kg serbatoio d'acqua (1 L, stampato in 3D in ASA, caricamento senza attrezzi)Autonomia stimata: ~10,67 kmCaratteristiche progettuali innovative
VTOL a rotori basculanti — i motori anteriori si inclinano per la transizione dal volo stazionario alla crociera ad ala fissa, consentendo operazioni su qualsiasi terreno incluso l'erba bagnataConfigurazione a coda a V — adottata per sopprimere l'instabilità di Dutch roll in hovering e nelle fasi di transizione, migliorando la stabilità laterale-direzionaleTripping dello strato limite turbolento — strisce zig-zag a 0,15c per prevenire il distacco del flusso a bassi numeri di Reynolds (Re ≈ 4,7×10⁵)Sistema payload fail-closed — valvola solenoide a molla normalmente chiusa garantisce che l'acqua non venga mai rilasciata involontariamente in caso di guasto elettricoParacadute Fruity Chutes IFC-84-SUL — sistema di recupero da 469 g con velocità di discesa di 4,57 m/s per conformità al Flight Termination SystemAvionica e autonomia
Flight Controller: CubePilot Cube Orange con firmware PX4 AutopilotGNSS: CubePilot Here 4 con precisione RTK per il rilascio accurato del payloadGCS: QGroundControl con geo-fence, quota AGL, velocità al suolo e velocità indicataLink RC: FrSky Archer R10 PRO a 2,4 GHz (FHSS, portata fino a 2 km)Telemetria: Holybro SiK Radio a 433 MHz (fino a 100 mW, protocollo MAVLink)Architettura di sicurezza
Due safety link anti-scintilla XT90-S accessibili dall'esterno (isolamento Principale + Motori)Bus DroneCAN con monitoraggio in tempo reale di giri, temperatura e corrente per ogni motoreAttivazione automatica del FTS in caso di violazione del geo-fence o perdita del segnale RC per 5 secondiAnalisi FMEA completa che copre le fasi di produzione, test e operazioni di voloZEFIRO Team — Dipartimento di Ingegneria Aerospaziale, Politecnico di Torino